Abstract
This paper presents the portable autonomous probing system (APS), a low-cost robotic design for collecting water quality measurements at targeted depths from an autonomous surface vehicle (ASV). This system fills an important, but often overlooked niche in marine sampling by enabling mobile sensor observations throughout the near-surface water column without the need for advanced underwater equipment. We present a probe delivery mechanism built with commercially available components and describe the corresponding open-source simulator and winch controller. Finally, we demonstrate the system in a field deployment and discuss design trade-offs and areas for future improvement.
Published in OCEANS 2021-MTS/IEEEFigures
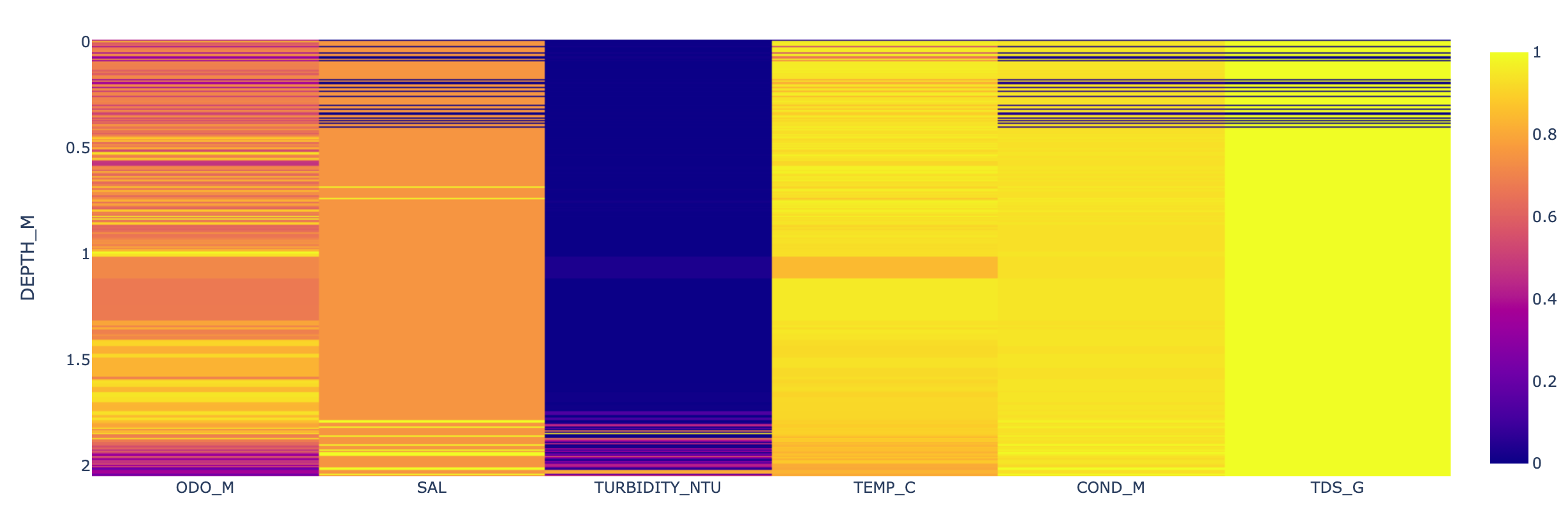
Sensor Correlation with Depth (click figure to interact)
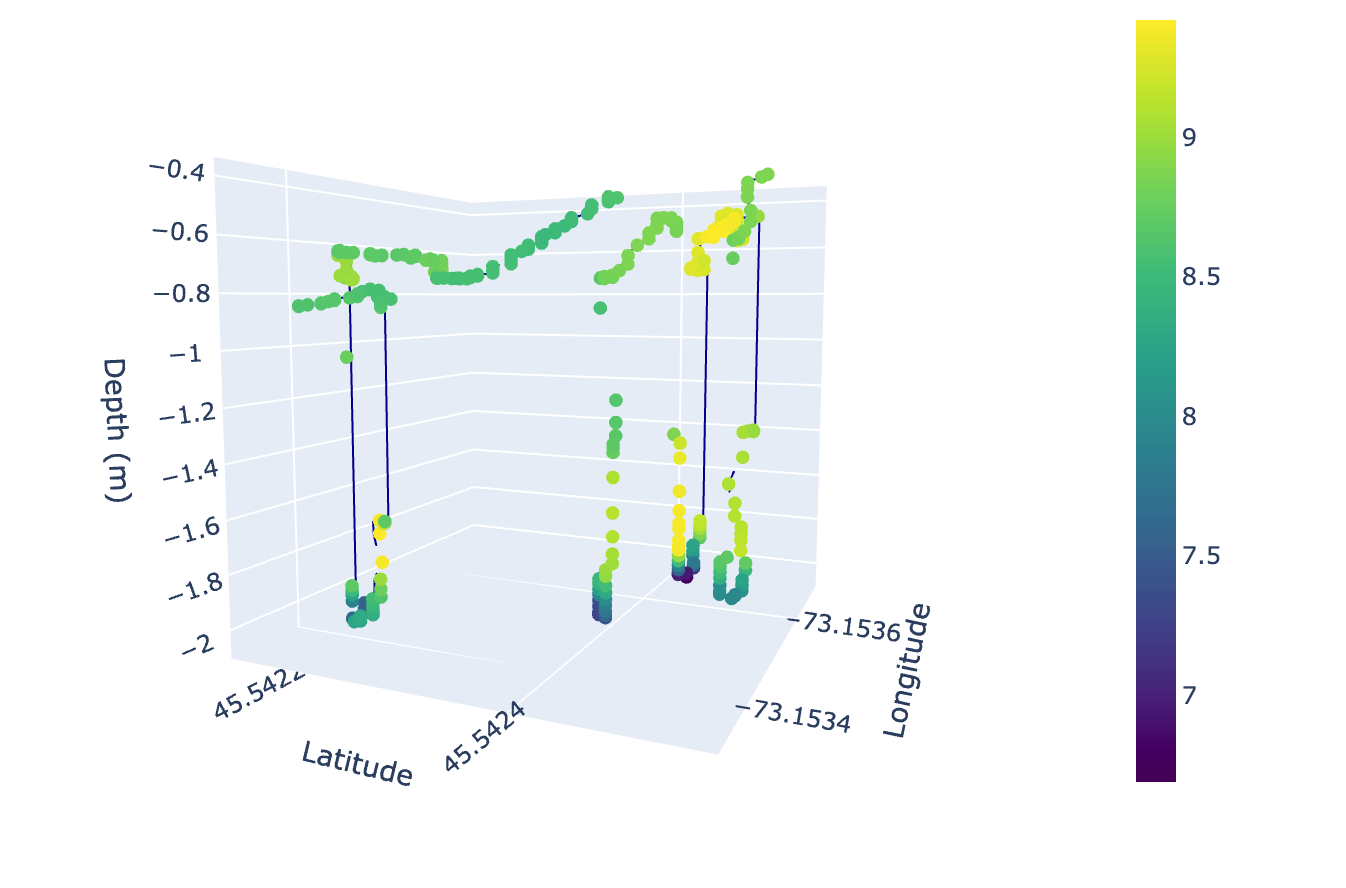
Plot of Optical Dissolved Oxygen observed at Depth (click figure to interact )
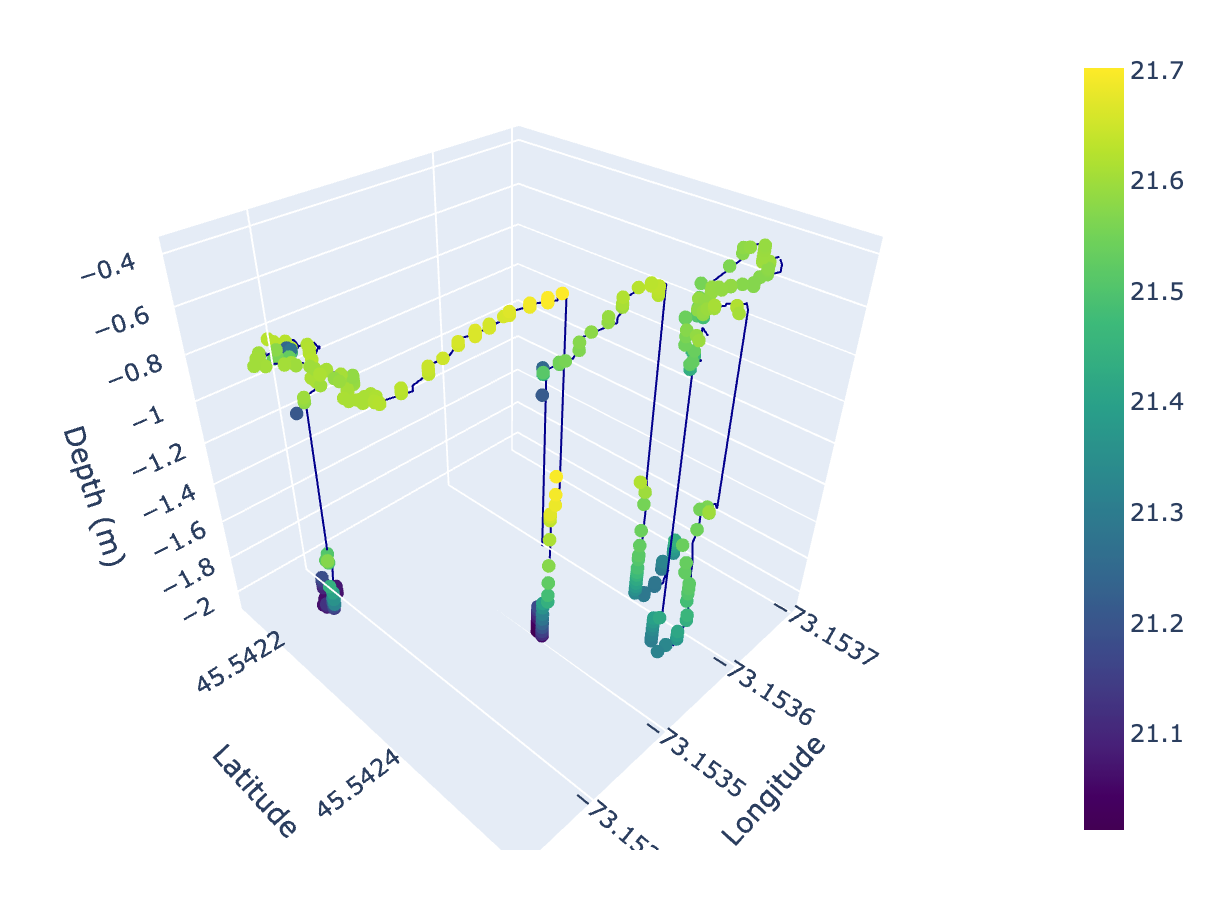
Plot of Temperature observed at Depth (click figure to interact)
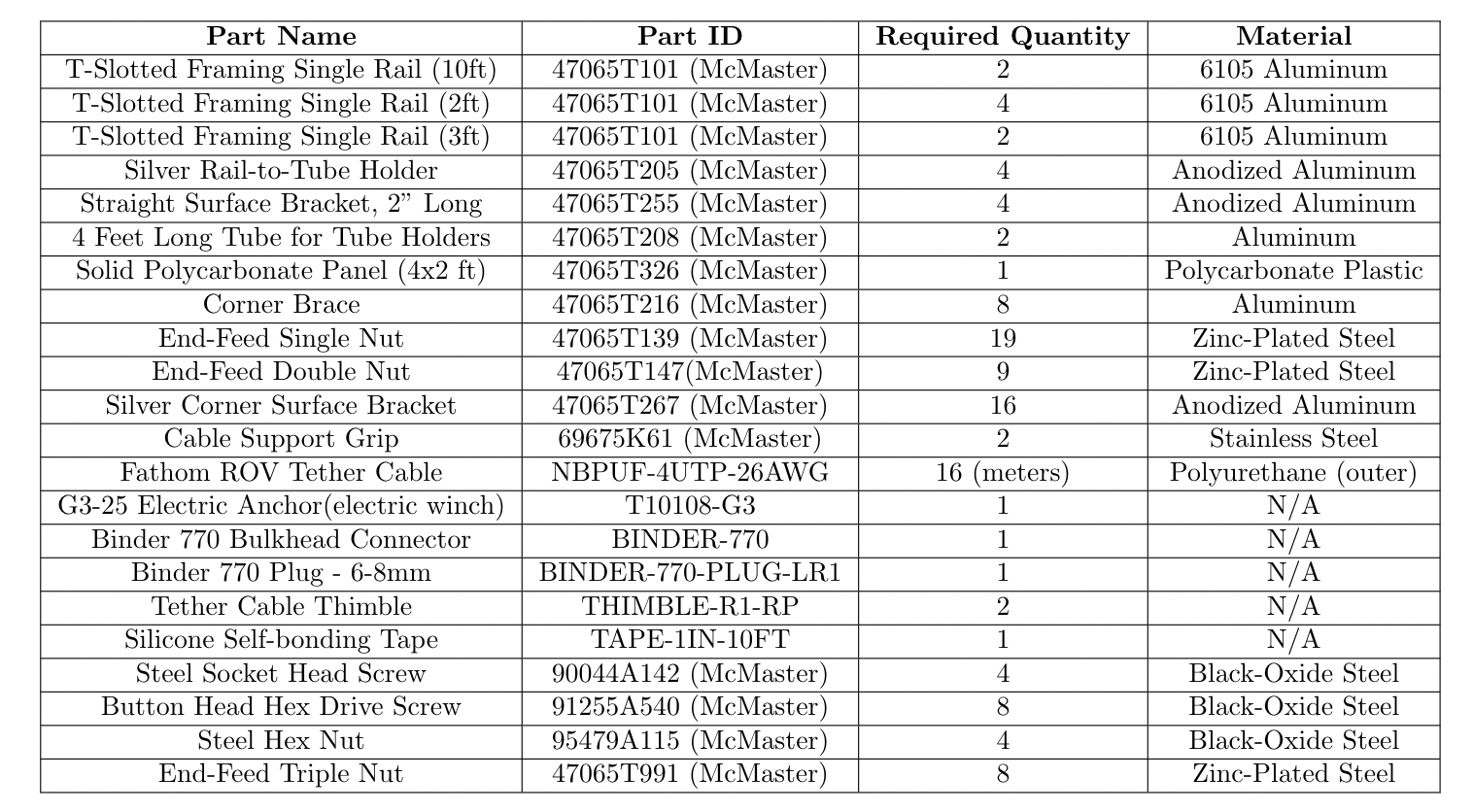
Bill of Materials